





Modbus¶а»ъНЁРЕАэіМ
ЎЎЎЎёшҙУ»ъПВ·ўІ»Н¬өДЦёБоЈ¬ҙУ»ъИҘЦҙРРІ»Н¬өДІЩЧчЈ¬ХвёцҫНКЗЕР¶ПТ»ПВ№ҰДЬВлјҙҝЙЈ¬әНОТГЗЗ°ұЯС§өДКөУГҙ®ҝЪАэіМКЗАаЛЖөДЎЈ¶а»ъНЁРЕЈ¬ОЮ·ЗҫНКЗМнјУБЛТ»ёцЙиұёөШЦ·ЕР¶П¶шТСЈ¬ДС¶ИТІІ»КЗәЬҙуЎЈОТГЗХТБЛТ»ёцModbusөчКФҫ«БйЈ¬НЁ№эЙиЦГЙиұёөШЦ·Ј¬¶БРҙјДҙжЖчөДөШЦ·ТФј°КэЦөКэБҝөИІОКэЈ¬ҝЙТФЦұҪУМжҙъҙ®ҝЪөчКФЦъКЦЈ¬ұИҪП·ҪұгөДПВ·ў¶аёцЧЦҪЪөДКэҫЭЈ¬ИзНј1ЛщКҫЎЈОТГЗПИАҙҫННјЦРөДЙиЦГәНКэҫЭАҙ¶ФModbusЧцҪшТ»ІҪөД·ЦОцЈ¬НјЦРөДКэҫЭАҙЧФУЪөчКФҫ«БйУлОТГЗҪУПВАҙТӘҪІөДАэіМЦ®јдөДҪ»»ҘЎЈ
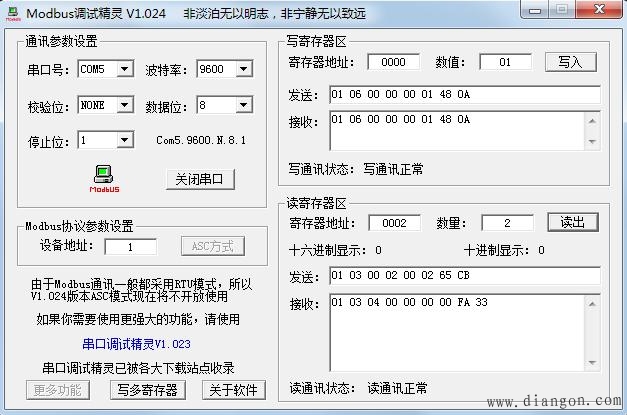
Нј1 ModbusөчКФҫ«Бй
ЎЎЎЎИзНјЈәОТГЗөДUSBЧӘ485ДЈҝйРйДвіцөДКЗCOM5Ј¬ІЁМШВК9600Ј¬ОЮРЈСйО»Ј¬КэҫЭО»КЗ8О»Ј¬1О»НЈЦ№О»Ј¬ЙиұёөШЦ·јЩЙиОӘ1ЎЈ
ЎЎЎЎРҙјДҙжЖчөДКұәтЈ¬Из№ыОТГЗТӘ°С01РҙөҪТ»ёцөШЦ·КЗ0000өДјДҙжЖчөШЦ·АпЈ¬өгТ»ПВЎ°РҙИлЎұЈ¬ҫН»біцПЦ·ўЛНЦёБоЈә01 06 00 00 00 01 48 0AЎЈОТГЗАҙ·ЦОцТ»ПВХвЦЎКэҫЭЈ¬ЖдЦР01КЗЙиұёөШЦ·Ј¬06КЗ№ҰДЬВлЈ¬ҙъұнРҙјДҙжЖчХвёц№ҰДЬЈ¬әуұЯёъ00 00ұнКҫөДКЗТӘРҙИлөДјДҙжЖчөДөШЦ·Ј¬00 01ҫНКЗТӘРҙИлөДКэҫЭЈ¬48 0AҫНКЗCRCРЈСйВлЈ¬ХвКЗИнјюЧФ¶ҜЛгіцАҙБЛЎЈ¶шёщҫЭModbusРӯТйЈ¬өұРҙјДҙжЖчөДКұәтЈ¬ҙУ»ъіЙ№ҰНкіЙёГЦёБоөДІЩЧчә󣬻б°СЦч»ъ·ўЛНөДЦёБоЦұҪУ·ө»ШЈ¬ОТГЗөДөчКФҫ«Бй»бҪУКХөҪХвСщТ»ЦЎКэҫЭЈә01 06 00 00 00 01 48 0AЎЈ
ЎЎЎЎјЩИзОТГЗПЦФЪТӘҙУјДҙжЖчөШЦ·0002ҝӘКј¶БИЎјДҙжЖчЈ¬ІўЗТ¶БИЎөДКэБҝКЗ2ёцЎЈөгТ»ПВЎ°¶БіцЎұЈ¬ҫН»біцПЦ·ўЛНЦёБоЈә01 03 00 02 00 02 65 CBЎЈЖдЦР01КЗЙиұёөШЦ·Ј¬03КЗ№ҰДЬВлЈ¬ҙъұнРҙјДҙжЖчХвёц№ҰДЬЈ¬00 02ҫНКЗ¶БјДҙжЖчөДЖрКјөШЦ·Ј¬әуТ»ёц00 02ҫНКЗТӘ¶БИЎ2ёцјДҙжЖчөДКэЦөЈ¬65 CBҫНКЗCRCРЈСйЎЈ¶шҪУКХөҪөДКэҫЭКЗЈә01 03 04 00 00 00 00 FA 33ЎЈЖдЦР01КЗЙиұёөШЦ·Ј¬03КЗ№ҰДЬВлЈ¬04ҙъұнөДКЗәуұЯ¶БөҪөДКэҫЭЧЦҪЪКэКЗ4ёцЈ¬00 00 00 00·ЦұрКЗөШЦ·ОӘ00 02әН00 03өДјДҙжЖчДЪІҝөДКэҫЭЈ¬¶шFA 33ҫНКЗCRCРЈСйБЛЎЈ
ЎЎЎЎЛЖәхФҪАҙФҪГчАКБЛЈ¬ЛщОҪөДModbusХвЦЦНЁРЕРӯТйЈ¬ОЮ·ЗҫНКЗЦч»ъПВ·ўБЛІ»Н¬өДЦёБоЈ¬ҙУ»ъёщҫЭЦёБоөДЕР¶ПАҙЦҙРРІ»Н¬өДІЩЧч¶шТСЎЈУЙУЪОТГЗөДҝӘ·ў°еГ»УРModbus№ҰДЬВлДЗГҙ¶аПаУҰөД№ҰДЬЈ¬ОТГЗФЪіМРтЦР¶ЁТеБЛТ»ёцКэЧйregGroup[5]Ј¬ПаөұУЪ5ёцјДҙжЖчЈ¬ҙЛНвУЦ¶ЁТеБЛөЪ6ёцјДҙжЖчЈ¬ҝШЦЖ·дГщЖчЈ¬НЁ№эПВ·ўІ»Н¬өДЦёБоОТГЗёДұдјДҙжЖчЧйөДКэҫЭ»тХЯёДұд·дГщЖчөДҝӘ№ШЧҙМ¬ЎЈФЪModbusРӯТйАпјДҙжЖчөДөШЦ·әНКэЦө¶јКЗ16О»өДЈ¬јҙ2ёцЧЦҪЪЈ¬ОТГЗД¬ИПёЯЧЦҪЪКЗ0x00Ј¬өНЧЦҪЪҫНКЗКэЧйregGroup¶ФУҰөДЦөЎЈЖдЦРөШЦ·0x0000өҪ0x0004¶ФУҰөДҫНКЗregGroupКэЧйЦРөДФӘЛШЈ¬ОТГЗРҙИлөДН¬Кұ°СКэЧЦУЦПФКҫөҪОТГЗөДLCD1602Тәҫ§ЙПЈ¬¶ш0x0005ХвёцөШЦ·Ј¬РҙИл0x00Ј¬·дГщЖчҫНІ»ПмЈ¬РҙИлИОәОЖдЛыКэЧЦЈ¬·дГщЖчҫНұЁҫҜЎЈОТГЗөҘЖ¬»ъөДЦчТӘ№ӨЧчТІҫНКЗҪвОцҙ®ҝЪҪУКХөДКэҫЭЦҙРРІ»Н¬ІЩЧчЈ¬ТІҫНКЗЦчТӘФЪRS485.CХвёцОДјюЦРБЛ
/***********************RS485.cОДјюіМРтФҙҙъВл*************************/
#include <reg52.h>
#include <intrins.h>
sbit RS485_DIR = P1^7; //RS485·ҪПтСЎФсТэҪЕ
bit flagOnceTxd = 0; //өҘҙО·ўЛННкіЙұкЦҫЈ¬јҙ·ўЛННкТ»ёцЧЦҪЪ
bit cmdArrived = 0; //ГьБоөҪҙпұкЦҫЈ¬јҙҪУКХөҪЙПО»»ъПВ·ўөДГьБо
unsigned char cntRxd = 0;
unsigned char pdata bufRxd[40]; //ҙ®ҝЪҪУКХ»әіеЗш
unsigned char regGroup[5]; //ModbusјДҙжЖчЧйЈ¬өШЦ·ОӘ0x00Ў«0x04
extern bit flagBuzzOn;
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern unsigned int GetCRC16(unsigned char *ptr, unsigned char len);
void ConfigUART(unsigned int baud) //ҙ®ҝЪЕдЦГәҜКэЈ¬baudОӘІЁМШВК
{
RS485_DIR = 0; //RS485ЙиЦГОӘҪУКХ·ҪПт
SCON = 0x50; //ЕдЦГҙ®ҝЪОӘДЈКҪ1
TMOD &= 0x0F; //ЗеБгT1өДҝШЦЖО»
TMOD |= 0x20; //ЕдЦГT1ОӘДЈКҪ2
TH1 = 256 - (11059200/12/32) / baud; //јЖЛгT1ЦШФШЦө
TL1 = TH1; //іхЦөөИУЪЦШФШЦө
ET1 = 0; //ҪыЦ№T1ЦР¶П
ES = 1; //К№ДЬҙ®ҝЪЦР¶П
TR1 = 1; //Жф¶ҜT1
}
unsigned char UartRead(unsigned char *buf, unsigned char len) //ҙ®ҝЪКэҫЭ¶БИЎәҜКэЈ¬КэҫЭҪУКХЦёХлbufЈ¬¶БИЎКэҫЭіӨ¶ИlenЈ¬·ө»ШЦөОӘКөјК¶БИЎөҪөДКэҫЭіӨ¶И
{
unsigned char i;
if (len > cntRxd) //¶БИЎіӨ¶ИҙуУЪҪУКХөҪөДКэҫЭіӨ¶ИКұЈ¬
{
len = cntRxd; //¶БИЎіӨ¶ИЙиЦГОӘКөјКҪУКХөҪөДКэҫЭіӨ¶И
}
for (i=0; i<len; i++) //ҝҪұҙҪУКХөҪөДКэҫЭ
{
*buf = bufRxd[i];
buf++;
}
cntRxd = 0; //ЗеБгҪУКХјЖКэЖч
return len; //·ө»ШКөјК¶БИЎіӨ¶И
}
void DelayX10us(unsigned char t) //ИнјюСУКұәҜКэЈ¬СУКұКұјд(t*10)us
{
do {
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
} while (--t);
}
void UartWrite(unsigned char *buf, unsigned char len) //ҙ®ҝЪКэҫЭРҙИләҜКэЈ¬јҙҙ®ҝЪ·ўЛНәҜКэЈ¬ҙэ·ўЛНКэҫЭЦёХлbufЈ¬КэҫЭіӨ¶Иlen
{
RS485_DIR = 1; //RS485ЙиЦГОӘ·ўЛН
while (len--) //·ўЛНКэҫЭ
{
flagOnceTxd = 0;
SBUF = *buf;
buf++;
while (!flagOnceTxd);
}
DelayX10us(5); //өИҙэЧоәуөДНЈЦ№О»НкіЙЈ¬СУКұКұјдУЙІЁМШВКҫц¶Ё
RS485_DIR = 0; //RS485ЙиЦГОӘҪУКХ
}
void UartDriver() //ҙ®ҝЪЗэ¶ҜәҜКэЈ¬јмІвҪУКХөҪөДГьБоІўЦҙРРПаУҰ¶ҜЧч
{
unsigned char i;
unsigned char cnt;
unsigned char len;
unsigned char buf[30];
unsigned char str[4];
unsigned int crc;
unsigned char crch, crcl;
if (cmdArrived) //УРГьБоөҪҙпКұЈ¬¶БИЎҙҰАнёГГьБо
{
cmdArrived = 0;
len = UartRead(buf, sizeof(buf)); //Ҫ«ҪУКХөҪөДГьБо¶БИЎөҪ»әіеЗшЦР
if (buf[0] == 0x01) //әЛ¶ФөШЦ·ТФҫц¶ЁКЗ·сПмУҰГьБоЈ¬ұҫАэұҫ»ъөШЦ·ОӘ0x01
{
crc = GetCRC16(buf, len-2); //јЖЛгCRCРЈСйЦө
crch = crc >> 8;
crcl = crc & 0xFF;
if ((buf[len-2] == crch) && (buf[len-1] == crcl)) //ЕР¶ПCRCРЈСйКЗ·сХэИ·
{
switch (buf[1]) //°ҙ№ҰДЬВлЦҙРРІЩЧч
{
case 0x03: //¶БИЎТ»ёц»тБ¬РшөДјДҙжЖч
if ((buf[2] == 0x00) && (buf[3] <= 0x05)) //јДҙжЖчөШЦ·Ц§іЦ0x0000Ў«0x0005
{
if (buf[3] <= 0x04)
{
i = buf[3]; //МбИЎјДҙжЖчөШЦ·
cnt = buf[5]; //МбИЎҙэ¶БИЎөДјДҙжЖчКэБҝ
buf[2] = cnt*2; //¶БИЎКэҫЭөДЧЦҪЪКэЈ¬ОӘјДҙжЖчКэ*2Ј¬ТтModbus¶ЁТеөДјДҙжЖчОӘ16О»
len = 3;
while (cnt--)
{
buf[len++] = 0x00; //јДҙжЖчёЯЧЦҪЪІ№0
buf[len++] = regGroup[i++]; //өНЧЦҪЪ
}
}
else //өШЦ·0x05ОӘ·дГщЖчЧҙМ¬
{
buf[2] = 2; //¶БИЎКэҫЭөДЧЦҪЪКэ
buf[3] = 0x00;
buf[4] = flagBuzzOn;
len = 5;
}
break;
}
else //јДҙжЖчөШЦ·І»ұ»Ц§іЦКұЈ¬·ө»ШҙнОуВл
{
buf[1] = 0x83; //№ҰДЬВлЧоёЯО»ЦГ1
buf[2] = 0x02; //ЙиЦГТміЈВлОӘ02-ОЮР§өШЦ·
len = 3;
break;
}
case 0x06: //РҙИлөҘёцјДҙжЖч
if ((buf[2] == 0x00) && (buf[3] <= 0x05)) //јДҙжЖчөШЦ·Ц§іЦ0x0000Ў«0x0005
{
if (buf[3] <= 0x04)
{
i = buf[3]; //МбИЎјДҙжЖчөШЦ·
regGroup[i] = buf[5]; //ұЈҙжјДҙжЖчКэҫЭ
cnt = regGroup[i] >> 4; //ПФКҫөҪТәҫ§ЙП
if (cnt >= 0xA)
str[0] = cnt - 0xA + 'A';
else
str[0] = cnt + '0';
cnt = regGroup[i] & 0x0F;
if (cnt >= 0xA)
str[1] = cnt - 0xA + 'A';
else
str[1] = cnt + '0';
str[2] = '\0';
LcdShowStr(i*3, 0, str);
}
else //өШЦ·0x05ОӘ·дГщЖчЧҙМ¬
{
flagBuzzOn = (bit)buf[5]; //јДҙжЖчЦөЧӘ»»ОӘ·дГщЖчөДҝӘ№Ш
}
len -= 2; //іӨ¶И-2ТФЦШРВјЖЛгCRCІў·ө»ШФӯЦЎ
break;
}
else //јДҙжЖчөШЦ·І»ұ»Ц§іЦКұЈ¬·ө»ШҙнОуВл
{
buf[1] = 0x86; //№ҰДЬВлЧоёЯО»ЦГ1
buf[2] = 0x02; //ЙиЦГТміЈВлОӘ02-ОЮР§өШЦ·
len = 3;
break;
}
default: //ЖдЛьІ»Ц§іЦөД№ҰДЬВл
buf[1] |= 0x80; //№ҰДЬВлЧоёЯО»ЦГ1
buf[2] = 0x01; //ЙиЦГТміЈВлОӘ01-ОЮР§№ҰДЬ
len = 3;
break;
}
crc = GetCRC16(buf, len); //јЖЛгCRCРЈСйЦө
buf[len++] = crc >> 8; //CRCёЯЧЦҪЪ
buf[len++] = crc & 0xFF; //CRCөНЧЦҪЪ
UartWrite(buf, len); //·ўЛНПмУҰЦЎ
}
}
}
}
void UartRxMonitor(unsigned char ms) //ҙ®ҝЪҪУКХјаҝШәҜКэ
{
static unsigned char cntbkp = 0;
static unsigned char idletmr = 0;
if (cntRxd > 0) //ҪУКХјЖКэЖчҙуУЪБгКұЈ¬јаҝШЧЬПЯҝХПРКұјд
{
if (cntbkp != cntRxd) //ҪУКХјЖКэЖчёДұдЈ¬јҙёХҪУКХөҪКэҫЭКұЈ¬ЗеБгҝХПРјЖКұ
{
cntbkp = cntRxd;
idletmr = 0;
}
else
{
if (idletmr < 5) //ҪУКХјЖКэЖчОҙёДұдЈ¬јҙЧЬПЯҝХПРКұЈ¬АЫ»эҝХПРКұјд
{
idletmr += ms;
if (idletmr >= 5) //ҝХПРКұјді¬№э4ёцЧЦҪЪҙ«КдКұјдјҙИПОӘТ»ЦЎГьБоҪУКХНкұП
{
cmdArrived = 1; //ЙиЦГГьБоөҪҙпұкЦҫ
}
}
}
}
else
{
cntbkp = 0;
}
}
void InterruptUART() interrupt 4 //UARTЦР¶П·юОсәҜКэ
{
if (RI) //ҪУКХөҪЧЦҪЪ
{
RI = 0; //КЦ¶ҜЗеБгҪУКХЦР¶ПұкЦҫО»
if (cntRxd < sizeof(bufRxd)) //ҪУКХ»әіеЗшЙРОҙУГНкКұЈ¬
{
bufRxd[cntRxd++] = SBUF; //ұЈҙжҪУКХЧЦҪЪЈ¬ІўөЭФцјЖКэЖч
}
}
if (TI) //ЧЦҪЪ·ўЛННкұП
{
TI = 0; //КЦ¶ҜЗеБг·ўЛНЦР¶ПұкЦҫО»
flagOnceTxd = 1; //ЙиЦГөҘҙО·ўЛННкіЙұкЦҫ
}
}
/***********************lcd1602.cОДјюіМРтФҙҙъВл*************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
void LcdWaitReady() //өИҙэТәҫ§ЧјұёәГ
{
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_E = 1;
sta = LCD1602_DB; //¶БИЎЧҙМ¬ЧЦ
LCD1602_E = 0;
} while (sta & 0x80); //bit7өИУЪ1ұнКҫТәҫ§ХэГҰЈ¬ЦШёҙјмІвЦұөҪЖдөИУЪ0ОӘЦ№
}
void LcdWriteCmd(unsigned char cmd) //РҙИлГьБоәҜКэ
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat) //РҙИлКэҫЭәҜКэ
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str) //ПФКҫЧЦ·ыҙ®Ј¬ЖБД»ЖрКјЧшұк(x,y)Ј¬ЧЦ·ыҙ®ЦёХлstr
{
unsigned char addr;
//УЙКдИлөДПФКҫЧшұкјЖЛгПФКҫRAMөДөШЦ·
if (y == 0)
addr = 0x00 + x; //өЪТ»РРЧЦ·ыөШЦ·ҙУ0x00ЖрКј
else
addr = 0x40 + x; //өЪ¶юРРЧЦ·ыөШЦ·ҙУ0x40ЖрКј
//УЙЖрКјПФКҫRAMөШЦ·Б¬РшРҙИлЧЦ·ыҙ®
LcdWriteCmd(addr | 0x80); //РҙИлЖрКјөШЦ·
while (*str != '\0') //Б¬РшРҙИлЧЦ·ыҙ®КэҫЭЈ¬ЦұөҪјмІвөҪҪбКш·ы
{
LcdWriteDat(*str);
str++;
}
}
void LcdInit() //Тәҫ§іхКј»ҜәҜКэ
{
LcdWriteCmd(0x38); //16*2ПФКҫЈ¬5*7өгХуЈ¬8О»КэҫЭҪУҝЪ
LcdWriteCmd(0x0C); //ПФКҫЖчҝӘЈ¬№вұк№ШұХ
LcdWriteCmd(0x06); //ОДЧЦІ»¶ҜЈ¬өШЦ·ЧФ¶Ҝ+1
LcdWriteCmd(0x01); //ЗеЖБ
}
№ШУЪCRCРЈСйөДЛг·ЁЈ¬Из№ыІ»КЗЧЁГЕС§П°РЈСйЛг·ЁұҫЙнЈ¬ҙујТҝЙТФІ»ИҘСРҫҝХвёціМРтөДПёҪЪЈ¬ОДөөЦұҪУёшОТГЗМṩБЛәҜКэЈ¬ОТГЗЦұҪУөчУГјҙҝЙЎЈ
/***********************CRC16.cОДјюіМРтФҙҙъВл*************************/
unsigned int GetCRC16(unsigned char *ptr, unsigned char len)
{
unsigned int index;
unsigned char crch = 0xFF; //ёЯCRCЧЦҪЪ
unsigned char crcl = 0xFF; //өНCRCЧЦҪЪ
unsigned char code TabH[] = { //CRCёЯО»ЧЦҪЪЦөұн
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
} ;
unsigned char code TabL[] = { //CRCөНО»ЧЦҪЪЦөұн
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
} ;
while (len--) //јЖЛгЦё¶ЁіӨ¶ИөДCRC
{
index = crch ^ *ptr++;
crch = crcl ^ TabH[index];
crcl = TabL[index];
}
return ((crch<<8) | crcl);
}
/***********************main.cОДјюіМРтФҙҙъВл*************************/
void ConfigTimer0(unsigned int ms);
extern void LcdInit();
extern void ConfigUART(unsigned int baud);
extern void UartRxMonitor(unsigned char ms);
extern void UartDriver();
void main ()
{
EA = 1; //ҝӘЧЬЦР¶П
ConfigTimer0(1); //ЕдЦГT0¶ЁКұ1ms
ConfigUART(9600); //ЕдЦГІЁМШВКОӘ9600
LcdInit(); //іхКј»ҜТәҫ§
while(1)
{
UartDriver();
}
}
void ConfigTimer0(unsigned int ms) //T0ЕдЦГәҜКэ
{
unsigned long tmp;
tmp = 11059200 / 12; //¶ЁКұЖчјЖКэЖөВК
tmp = (tmp * ms) / 1000; //јЖЛгЛщРиөДјЖКэЦө
tmp = 65536 - tmp; //јЖЛг¶ЁКұЖчЦШФШЦө
tmp = tmp + 34; //РЮХэЦР¶ППмУҰСУКұФміЙөДОуІо
T0RH = (unsigned char)(tmp >> 8); //¶ЁКұЖчЦШФШЦөІр·ЦОӘёЯөНЧЦҪЪ
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //ЗеБгT0өДҝШЦЖО»
TMOD |= 0x01; //ЕдЦГT0ОӘДЈКҪ1
TH0 = T0RH; //јУФШT0ЦШФШЦө
TL0 = T0RL;
ET0 = 1; //К№ДЬT0ЦР¶П
TR0 = 1; //Жф¶ҜT0
}
void InterruptTimer0() interrupt 1 //T0ЦР¶П·юОсәҜКэ
{
TH0 = T0RH; //¶ЁКұЖчЦШРВјУФШЦШФШЦө
TL0 = T0RL;
if (flagBuzzOn) //·дГщЖчГщҪР»т№ШұХ
BUZZ = ~BUZZ;
else
BUZZ = 1;
UartRxMonitor(1); //ҙ®ҝЪҪУКХјаҝШ
}

ұајӯЈәadmin ЧоәуРЮёДКұјдЈә2018-05-08





