您好,欢迎进入江南娱乐手机客户端 官方网站!
您好,欢迎进入江南娱乐手机客户端 官方网站!
导读:PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。 PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,广泛应用在从测量、通信到功率控制与变换的许多领域中。
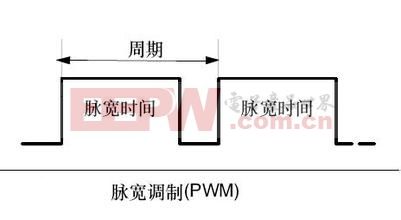
脉宽调制(PWM)基本原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。

例如,把正弦半波波形分成N等份,就可把正弦半波看成由N个彼此相连的脉冲所组成的波形。这些脉冲宽度相等,都等于 ∏/n ,但幅值不等,且脉冲顶部不是水平直线,而是曲线,各脉冲的幅值按正弦规律变化。如果把上述脉冲序列用同样数量的等幅而不等宽的矩形脉冲序列代替,使矩形脉冲的中点和相应正弦等分的中点重合,且使矩形脉冲和相应正弦部分面积(即冲量)相等,就得到一组脉冲序列,这就是PWM波形。可以看出,各脉冲宽度是按正弦规律变化的。根据冲量相等效果相同的原理,PWM波形和正弦半波是等效的。对于正弦的负半周,也可以用同样的方法得到PWM波形。
在PWM波形中,各脉冲的幅值是相等的,要改变等效输出正弦波的幅值时,只要按同一比例系数改变各脉冲的宽度即可,因此在交-直-交变频器中,PWM逆变电路输出的脉冲电压就是直流侧电压的幅值。
根据上述原理,在给出了正弦波频率,幅值和半个周期内的脉冲数后,PWM波形各脉冲的宽度和间隔就可以准确计算出来。按照计算结果控制电路中各开关器件的通断,就可以得到所需要的PWM波形。
下图为输出时的PWM波的实时波形。

PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换,让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。
对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM用于通信的主要原因。从模拟信号转向PWM可以极大地延长通信距离。在接收端,通过适当的RC或LC网络可以滤除调制高频方波并将信号还原为模拟形式。
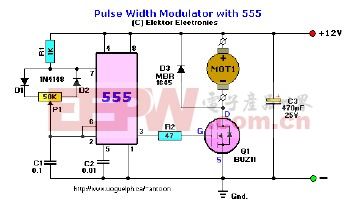
由NE555产生的PWM调速系统
总之,PWM既经济、节约空间、抗噪性能强,是一种值得广大工程师在许多设计应用中使用的有效技术。
脉冲宽度模式(PWM模式)可以用来产生一个由TIMx_ARR寄存器确定平率,由TIMx_CCRx寄存器确定占空比的信号。在STM32开发中,由于官方提供了较为完善的库函数,使得我们的开发工作变得相当的轻松,甚至可以在不需要太多了解硬件结构的条件下,完成我的开发工作,实现我们所需要的功能。在此,笔者也建议大家,在初学的时候尽量去熟悉固件库中提供的函数来调节PWM的频率和占空比,对底层寄存器的操作应尽量减少。
本文使用的STM32F103RB的芯片,输出通道是TIM2_CH2通道,STM32有较强的可移植性,如果读者的芯片类型跟我不一样,可以做适当的修改,完成自己的开发。
使用到的库函数有:
stm32f10x.h:用以系统的初始化,无论做什么开发,该库必须包含
stm32f10x_tim.h:TIM定时器库函数
stm32f10x_rcc.h:时钟配置库函数
stm32f10x_gpio.h:GPIO配置库函数
由以上的库函数可知,我们需要初始化的内容有TIM2定时器,时钟使能配置,GPIO的使能配置。
void RCC_Config(void);
void GPIO_Config(void);
void TIM_Config(void);接下来就是编写各个函数的函数体,在这些内容里面,其实官方已经给出了示例,我们按照官方给的函数库进行配置,然后修改一下官方的一些变量属性即可。
RCC_Config函数体
void RCC_Config(void)
{
//使能GPIOA,TIM2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
}GPIO_Config函数体
void GPIO_Config(void)
{
//GPIO的配置,官方库有给出需要配置的一些参数,如果忘记了,参照一下即可,我这里配置的是GPIOA_Pin_1
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}TIM_Config函数体
在配置函数体之前,先了解一下stm32的占空比以及频率是如何计算的
①频率:我们使用的APB1时钟源是72MHz的,在此我们不做分频,通过配置相关的参数来设置输入频率,计算方法:输入频率=APB1时钟/(预分频系数+1)=72000000Hz/360=200000Hz
②TIM_TImeBaseStructure.TIM_Period参数决定了输出PWM波形的频率,输出PWM波形的频率=定时器的输入频率/TIM_TImeBaseStructure.TIM_Period,本例程20000Hz/100=200Hz,即5ms一个周期
③配置占空比:占空比=配置占空比的值/ TIM_TImeBaseStructure.TIM_Period,以此计算来确定占空比,本案例的占空比为50/100=50%
④定时器使能
void TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TImeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//配置TIM2的时钟输出频率,以及其它相关参数初始化
TIM_TImeBaseStructure.TIM_Prescaler=360-1;//设置PWM的频率
TIM_TImeBaseStructure.TIM_CounterMode=0;
TIM_TImeBaseStructure.TIM_Period=100;
TIM_TimeBaseInit(TIM2,&TIM_TImeBaseStructure);
//设置PWM的输出方式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
//配置占空比
TIM_OCInitStructure.TIM_Pulse=50;
TIM_OC2Init(TIM2,&TIM_OCInitStructure);
TIM_ForcedOC1Config(TIM2,TIM_ForcedAction_Active);
TIM_Cmd(TIM2,ENABLE);
TIM_CtrlPWMOutputs(TIM2,ENABLE);
}
由此,我们的整个PWM配置完成
Main函数
int main()
{
RCC_Config();
GPIO_Config();
TIM_Config();
while(1)
{
;
}
}接下来,我们讲解一下,在Keil里面看我们的GPIOA_Pin_1引脚的输出频率,波形
①配置调试工具
②打开调试,并设置并检测GPIO的输出引脚 
③全速运行,观察示波器 
下一篇:说说M451例程讲解之串口











